
1. 代表性研究成果
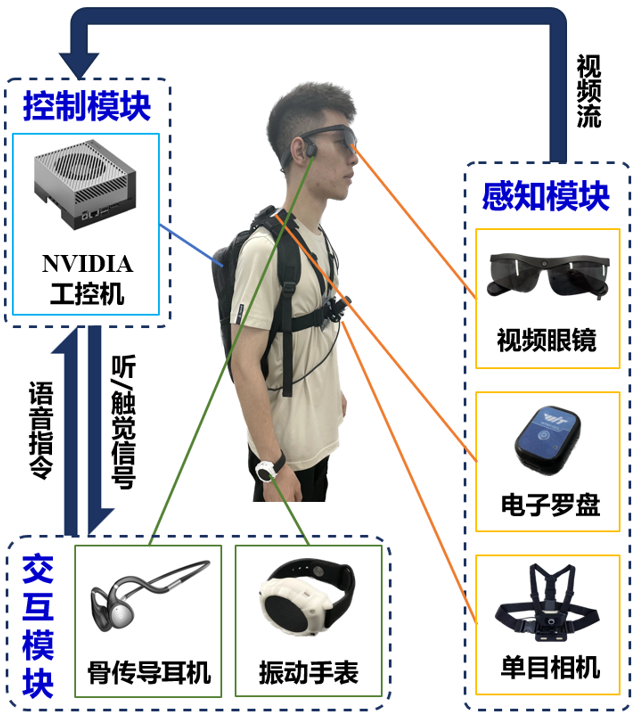
(1)穿戴式助盲导航机器人
设计“拓扑建图-视觉推理-多感官交互”一体化的穿戴式助盲导航机器人,基于拓扑语义地图的全局路径规划算法和基于语义分割发可通行区域局部规划,提出“听觉场景描述+触觉实时避障”的双闭环交互式系统,实现盲人在大范围陌生室内场景安全行走。

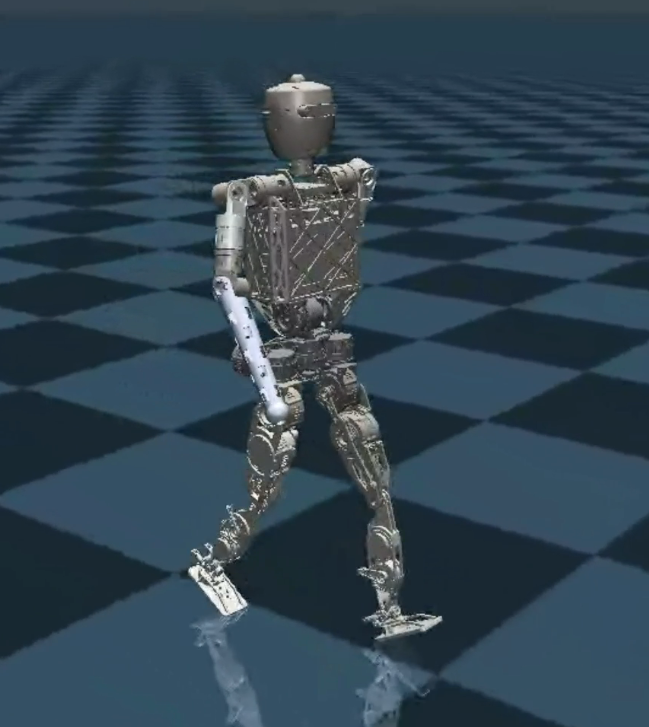
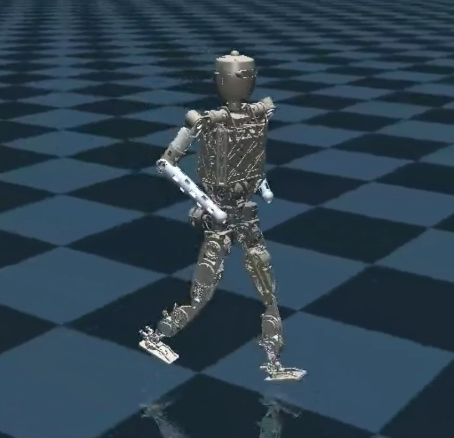
(2)足式自学习运动控制
创建了分布式步态训练框架,提出基于类别相似性度量的非确定模型仿真方法,实现了四足、双足机器人未知复杂环境下的自学习运动控制,将自学习的步态控制策略迁移至四足机器人,运动速度与能量效率优于节律性控制方法。


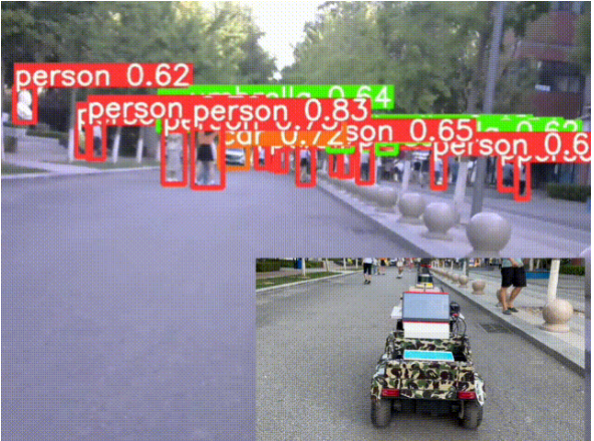
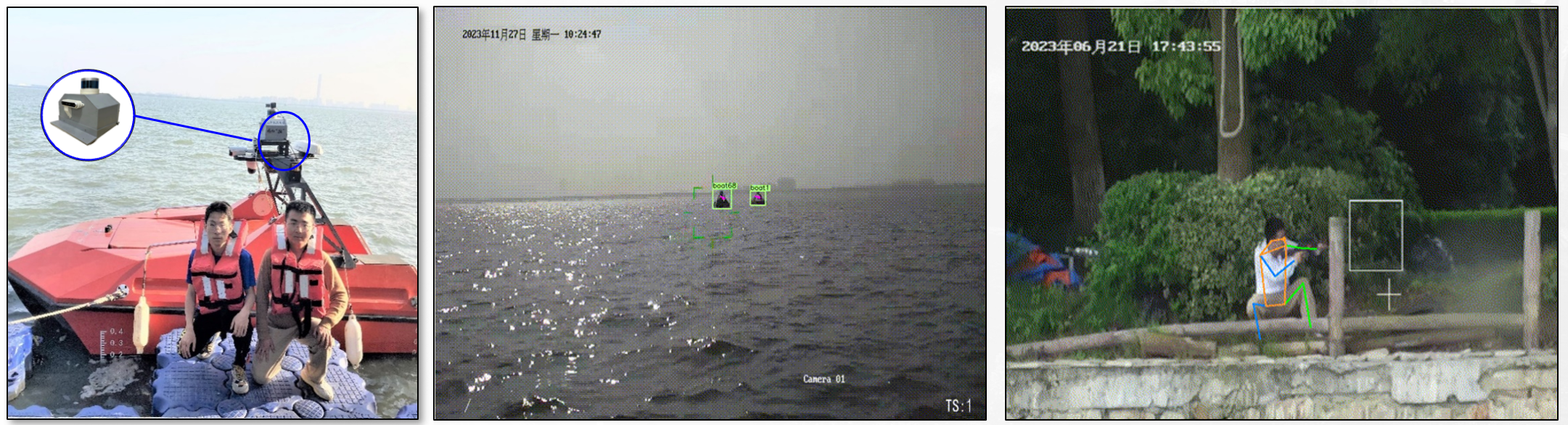
(3)目标检测与跟踪
提出基于稀疏卷积网络的变尺度目标识别技术,构建基于自适应孪生网络的目标持续跟踪网络,设计基于自注意力机制的危险动作识别方法。将所提算法在多个无人平台进行测试,可实现特定目标准确检测和跟踪。
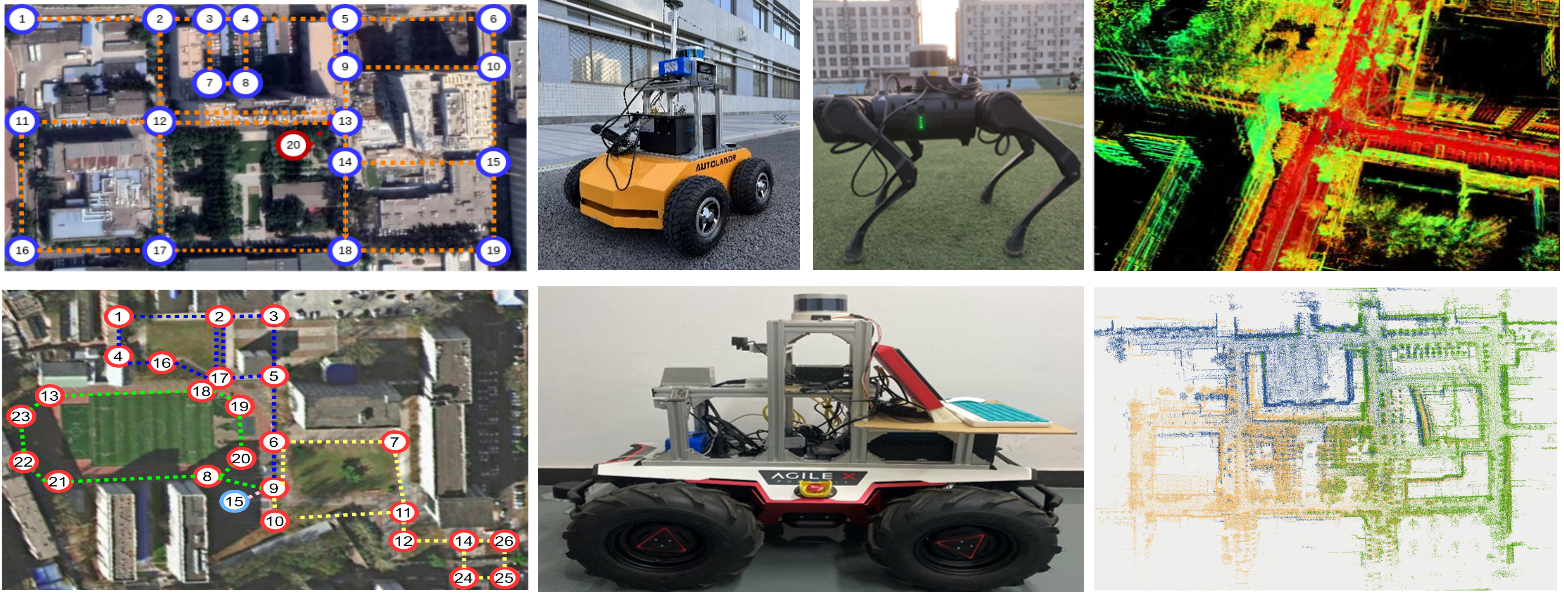
(4)异构机器人联合建图
研究多源异构传感器数据融合方法,构建分布式多机协同建图框架,进行单机局部地图构建和多机间局部地图关键帧数据共享,提出多机系统环境探索策略和数据关联方法,实现异构多机器人全局几何一致地图构建。
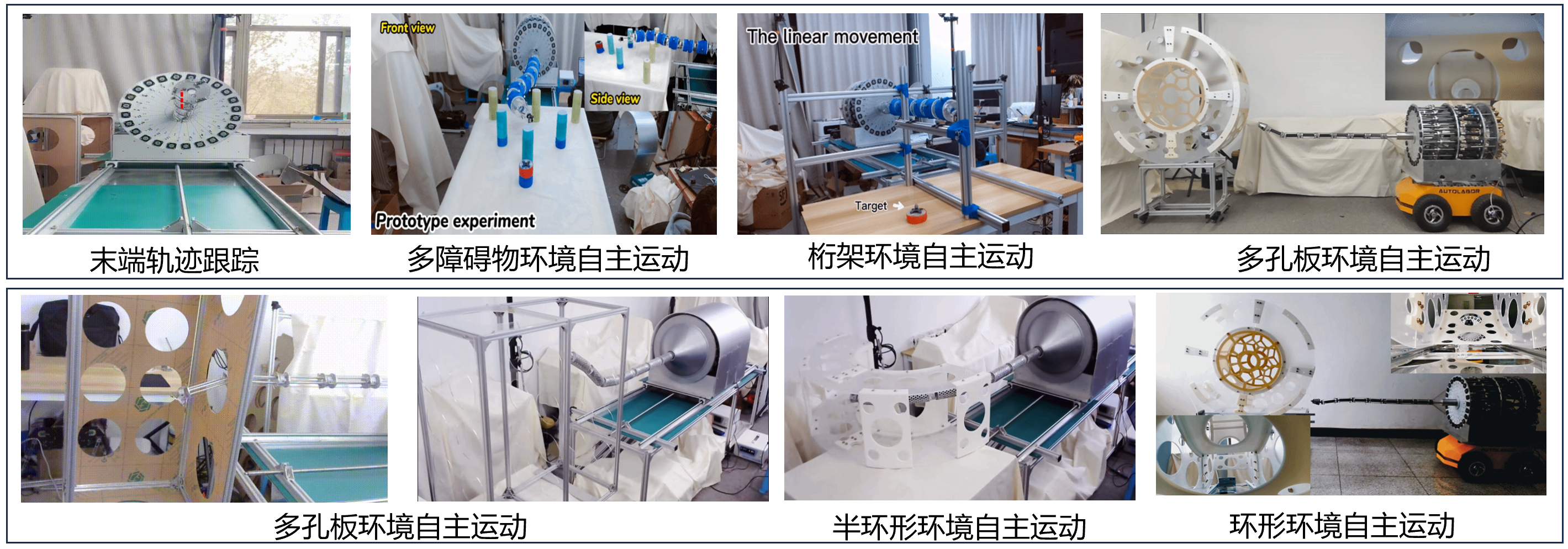
(5)深腔探测蛇形机械臂
设计了变尺度、驱测一体化关节和旋转式、模块化驱动单元,研制了一款 17 自由度“离散式刚性连杆+柔顺绳索驱动”的蛇形臂,提出融合随机偏置概率和动态空间约束的路径规划算法,实现典型实验场景下路径规划-精准跟踪-自主控制。
2. 主要科研项目
序号 | 项目类型 | 项目名称 | 获批 年份 |
1 | 国家自然科学基金重大研究计划重点支持项目 | 大范围陌生室内环境下穿戴式助盲导航机器人关键技术研究 | 2022 |
2 | 国家自然科学基金项目 | 面向大范围化工园区的异构多机器人 自主协同巡检方法 | 2025 |
3 | 国家自然科学基金项目 | 面向室外环境的刚-柔耦合腿臂机器人牵引式导盲作业关键技术研究 | 2025 |
4 | 国家自然科学基金项目 | 面向O2O模式的美团外卖即时配送 调度方法 | 2023 |
5 | 国家自然科学基金项目 | 疫情封闭环境下多物流机器人自主协同作业方法 | 2022 |
6 | 国家自然科学基金项目 | 面向深腔作业的蛇形机械臂机构优化 设计与运动控制研究 | 2022 |
7 | 国家自然科学基金项目重大研究计划 | 异构仓储物流机器人集群自主作业研究 | 2019 |
8 | 国家自然科学基金项目重大研究计划 | 面向危险化工过程的多机器人协同智能监控关键技术研究 | 2018 |
9 | 国家重点研发计划课题 | 面向制造场景的多模态信息感知、知识推理和语义表达 | 2024 |
10 | 国家重点研发计划课题 | 异构多机器人主动全域环境感知与理解 | 2020 |
11 | 黑龙江省自然科学基金-重点项目 | 面向火灾救援的液压人形机器人行走 技能自学习 | 2024 |
12 | 北京市自然科学基金-小米创新联合基金项目-重点项目 | 非结构化工业环境的建模与人形机器人运动的虚实融合仿真 | 2024 |
13 | 北京市自然科学基金-小米创新联合基金项目 | 需求驱动的柔性3C制造车间智能 调度方法 | 2024 |
14 | 北京市自然科学基金 | 高地形适应性多足移动平台粗细粒度 越障行为自主控制方法研究 | 2024 |
15 | 北京市自然科学基金-小米创新联合基金项目 | 面向疫情校园环境下智能监控的仿生 四足机器人全地形自主导航方法 | 2022 |
3. 代表性学术论文
[1] Zhengcai Cao*, Qing Xiao, Ran Huang, Mengchu Zhou, Robust Neuro-Optimal Control of Underactuated Snake Robots With Experience Replay,IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 208-217. (Top,IF:8.9)
[2] Zhengcai Cao*, Qing Xiao, Mengchu Zhou*, Distributed Fusion-Based Policy Search for Fast Robot Locomotion Learning. IEEE Computational Intelligence Magazine, 2019, 14(3): 19-28. (IF:11.2)
[3] Zhengcai Cao, Chengran Lin, MengChu Zhou*, Ran Huang*, Scheduling Semiconductor Testing Facility by Using Cuckoo Search Algorithm With Reinforcement Learning and Surrogate Modeling,IEEE Transactions on Automation Science and Engineering, 2019, 16(2): 825-837. (IF:6.4)
[4] Meng Zhou, Zhengcai Cao*, Ye Wang, Robust Fault Detection and Isolation Based on Finite-frequency H-/H∞ Unknown Input Observers and Zonotopic Threshold Analysis, IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 750-759. (Top,IF:19.2)
[5] Zhengcai Cao*, Xiaowen Xu, Biao Hu*, Meng Zhou, Qinglin Li, Real-time gesture recognition based on feature recalibration network with multi-scale information. Neurocomputing, 2019, 347: 119-130. (IF:6.5)
[6] Biao Hu, Zhengcai Cao*, Minimizing Resource Consumption Cost of DAG Applications With Reliability Requirement on Heterogeneous Processor Systems.IEEE Transactions on Industrial Informatics, 2020, 16(12): 7437-7447. (Top,IF:9.9)
[7] Meng Zhou, Zhengcai Cao*, MengChu Zhou*, Jing Wang, Zhenhua Wang, Zonotoptic Fault Estimation for Discrete-Time LPV Systems With Bounded Parametric Uncertainty, IEEE Transactions on Intelligent Transportation Systems, 2020, 21(2): 690-700. (Top,IF:8.4)
[8] Zhengcai Cao*, Chengran Lin, MengChu Zhou*, JiaQi Zhang, Surrogate-Assisted Symbiotic Organisms Search Algorithm for Parallel Batch Processor Scheduling, IEEE/ASME Transactions on Mechatronics, 2020, 25(5): 2155-2166. (Top,IF:7.3)
[9] Dong Zhang, Hao Yuan, Zhengcai Cao*, Environmental Adaptive Control of a Snake-like Robot with Variable Stiffness Actuators, IEEE/CAA Journal of Automatica Sinica, 2020, 7(3): 745-751. (Top,IF:19.2)
[10] Meng Zhou, Zhengcai Cao*, MengChu Zhou*, Jing Wang, Finite-Frequency H-/H∞ Fault Detection for Discrete-Time T-S Fuzzy System With Unmeasurable Premise Variables, IEEE Transactions on Cybernetics, 2021, 51(6): 3017-3026. (Top,IF:10.5)
[11] Zhengcai Cao*, Dong Zhang, MengChu Zhou*, Modeling and Control of Hybrid 3-D Gaits of Snake-Like Robots, IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(10): 4603-4612. (Top,IF:8.9)
[12] Biao Hu, Zhengcai Cao*, MengChu Zhou*, An Efficient RRT-Based Framework for Planning Short and Smooth Wheeled Robot Motion Under Kinodynamic Constraints, IEEE Transactions on Industrial Electronics, 2021, 68(4): 3292-3302. (Top,IF:7.2)
[13] Zhengcai Cao*, Xiaowen Xu, Biao Hu, MengChu Zhou*, Rapid Detection of Blind Roads and Crosswalks by Using a Lightweight Semantic Segmentation Network, IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6188-6197. (Top,IF:8.4)
[14] Zhengcai Cao*, Chengran Lin, MengChu Zhou*, A Knowledge-Based Cuckoo Search Algorithm to Schedule a Flexible Job Shop With Sequencing Flexibility, IEEE Transactions on Automation Science and Engineering, 2021, 18(1): 56-69. (IF:6.4)
[15] Zhengcai Cao, Dong Zhang*, MengChu Zhou*, Direction Control and Adaptive Path Following of 3-D Snake-Like Robot Motion, IEEE Transactions on Cybernetics, 2022, 52(10): 10980-10987. (Top,IF:10.5)
[16] Biao Hu, Shengjie Xu, Zhengcai Cao*, MengChu Zhou*, Safety-Guaranteed and Development Cost-Minimized Scheduling of DAG Functionality in an Automotive System, IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4): 3074-3086. (Top,IF:8.4)
[17] Chengran Lin, Zhengcai Cao*, MengChu Zhou*, Learning-Based Grey Wolf Optimizer for Stochastic Flexible Job Shop Scheduling, IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 3659-3671. (IF:6.4)
[18] Biao Hu, Zhengcai Cao*, MengChu Zhou*, Energy-Minimized Scheduling of Real-Time Parallel Workflows on Heterogeneous Distributed Computing Systems, IEEE Transactions on Services Computing, 2022, 15(5): 2766-2779. (IF:5.8)
[19] Zhengcai Cao*, Chengran Lin, MengChu Zhou*, Chuanguang Zhou, Khaled Sedraoui, Two-Stage Genetic Algorithm for Scheduling Stochastic Unrelated Parallel Machines in a Just-in-Time Manufacturing Context, IEEE Transactions on Automation Science and Engineering, 2022, 20(2): 936-949. (IF:6.4)
[20] Biao Hu, Zhengcai Cao*, MengChu Zhou*, Scheduling Real-Time Parallel Applications in Cloud to Minimize Energy Consumption, IEEE Transactions on Cloud Computing, 2022, 10(1): 662-674. (IF:5)
[21] Junnian Li, Dong Zhang, MengChu Zhou*, Zhengcai Cao*. A motion blur QR code identification algorithm based on feature extracting and improved adaptive thresholding. Neurocomputing, 2022, 493:351-361. (IF:6.5)
[22] Chengran Lin, Zhengcai Cao*, MengChu Zhou*, Learning-Based Cuckoo Search Algorithm to Schedule a Flexible Job Shop With Sequencing Flexibility, IEEE Transactions on Cybernetics, 2023, 53(10): 6663-6675. (Top,IF:10.5)
[23] Zhengcai Cao, Junnian Li, Dong Zhang*, Mengchu Zhou*, Abdullah Abusorrah, A Multi-Object Tracking Algorithm With Center-Based Feature Extraction and Occlusion Handling, IEEE Transactions on Intelligent Transportation Systems, 2023, 24(4): 4464-4473. (Top,IF:8.4)
[24] Biao Hu, Yinbin Shi, Zhengcai Cao*, MengChu Zhou*, A Hybrid Scheduling Framework for Mixed Real-Time Tasks in an Automotive System With Vehicular Network, IEEE Transactions on Cloud Computing, 2023, 11(3): 2231-2244. (IF:5)
[25] Yiyang Sun, Zhe Ma, MengChu Zhou*, Zhengcai Cao*, A Topological Semantic Mapping Method Based on Text-Based Unsupervised Image Segmentation for Assistive Indoor Navigation, IEEE Transactions on Instrumentation and Measurement, 2023, 72: 2531513. (IF:5.9)
[26] Hongyu Xie, Dong Zhang, Xiaobo Hu, MengChu Zhou*, Zhengcai Cao*, Autonomous Multirobot Navigation and Cooperative Mapping in Partially Unknown Environments, IEEE Transactions on Instrumentation and Measurement, 2023, 72: 4508712. (IF:5.9)
[27] Hongyu Xie, Dong Zhang, Jun Wang, MengChu Zhou*, Zhengcai Cao*, Xiaobo Hu, Abdullah Abusorrah, Semi-Direct Multimap SLAM System for Real-Time Sparse 3-D Map Reconstruction, IEEE Transactions on Instrumentation and Measurement, 2023, 72: 4502013. (IF:5.9)
[28] Zhengcai Cao*, Lijie Zhou, Chengran Lin, Mengchu Zhou*, Solving an order batching, picker assignment, batch sequencing and picker routing problem via information integration, Journal of Industrial Information Integration, 2023, 31: 100414. (Top,IF:11.6)
[29] Lijie Zhou, Chengran Lin*, Zhengcai Cao, Reinforcement-Learning-Based Local Search Approach to Integrated Order Batching: Driving Growth for Logistics and Retail, IEEE Robotics & Automation Magazine, 2023, 30(2): 34-45. (IF:7.1)
[30] Hongmin Mu, Gang Zhang, Zhe Ma, MengChu Zhou*, Zhengcai Cao*, Dynamic Obstacle Avoidance System Based on Rapid Instance Segmentation Network, IEEE Transactions on Intelligent Transportation Systems, 2024, 25(5): 4578-4592. (Top,IF:8.4)
[31] Yinbin Shi, Ji Xia, MengChu Zhou*, Zhengcai Cao*, A Dual-Feature-Based Adaptive Shared Transformer Network for Image Captioning, IEEE Transactions on Instrumentation and Measurement, 2024, 73: 5009613. (IF:5.9)
[32] Zhengcai Cao, Chengran Lin*, MengChu Zhou, XiaoHao Wen*, Learning-Based Genetic Algorithm to Schedule an Extended Flexible Job Shop, IEEE Transactions on Cybernetics, 2024, 54(11): 6909-6920. (Top,IF:10.5)
[33] Biao Hu*, Yinbin Shi, Gang Chen, Zhengcai Cao, MengChu Zhou*, Workload-Aware Scheduling of Real-Time Jobs in Cloud Computing to Minimize Energy Consumption, IEEE Internet of Things Journal, 2024, 11(1): 638-652. (Top,IF:8.9)
[34] Dong Zhang, Renjie Ju, Zhengcai Cao*, Reinforcement learning-based motion control for snake robots in complex environments, Robotica, 2024, 42(4): 947-961.
[35] Renjie Ju, Dong Zhang, Yan Gai, Zhengcai Cao*, A local collision-free motion planning strategy for hyper-redundant manipulators based on dynamic safety envelopes, Robotica, 2024, 42(7): 2388-2402.
[36] Dong Zhang, Renjie Ju, Zhengcai Cao*, DDPG-based path planning for cable-driven manipulators in multi-obstacle environments, Robotica, 2024, 42(8): 2677-2689.
[37] Dong Zhang, Yan Gai, Renjie Ju, MengChu Zhou*, Zhengcai Cao*, A Cosine Similarity Based Multitarget Path Planning Algorithm for Cable-Driven Manipulators, IEEE/ASME Transactions on Mechatronics, 2025, 30(3): 2379-2388. (Top,IF:7.3)
[38] Chengran Lin, Zhengcai Cao*, MengChu Zhou*, Autoencoder-Embedded Iterated Local Search for Energy-Minimized Task Schedules of Human-Cyber-Physical Systems, IEEE Transactions on Automation Science and Engineering, 2025, 22: 512-522. (IF:6.4)
[39] Zhengcai Cao, Xinsai Lv, Chengran Lin*, Learning-Aided Iterated Local Search Algorithm for Integrated Order Batching, Picker Assignment, Batch Sequencing, and Picker Routing Problem, IEEE Transactions on Automation Science and Engineering, 2025, 22: 7421-7434. (IF:6.4)
[40] Zhengcai Cao, Junnian Li*, Shibo Shao, Dong Zhang, MengChu Zhou*, Siamese Adaptive Network-Based Accurate and Robust Visual Object Tracking Algorithm for Quadrupedal Robots, IEEE Transactions on Cybernetics, 2025, 55(3): 1264-1276. (Top,IF:10.5)
[41] Zhengcai Cao*, Ji Xia, MengChu Zhou*, De-confounding Feature Fusion Transformer Network for Image Captioning in Assistive Navigation Applications for the Visually Impaired, IEEE Transactions on Instrumentation and Measurement, 2025, 74:4006112. (IF:5.9)
[42] Dong Zhang, Dongjie Huo, Mengchu Zhou*, Zhengcai Cao*, MPC-DS: A Safe Path Tracking Method for UGVs in Dynamic Environments with Dense Obstacles, IEEE Transactions on Intelligent Transportation Systems, 2025, Accepted. (Top,IF:8.4)
[43] Hongmin Mu, Gang Zhang, MengChu Zhou*, Zhengcai Cao*, End-to-end Semantic Segmentation Network for Low-Light Scenes, IEEE International Conference on Robotics and Automation, 2024: 7725-7731.(机器人领域顶会)
[44] Zhengcai Cao*, Junnian Li, Jie Niu, MengChu Zhou*, QuerySOD: A Small Object Detection Algorithm Based on Sparse Convolutional Network and Query Mechanism, IEEE/RSJ Conference on Intelligent International Robots and Systems, 2024: 9580-9586.(机器人领域顶会)
[45] Zhengcai Cao*, Ji Xia, Yinbin Shi, MengChu Zhou, A Lightweight De-confounding Transformer for Image Captioning in Wearable Assistive Navigation Device. IEEE/RSJ Conference on Intelligent International Robots and Systems, 2024: 7422-7428.(机器人领域顶会)
[46] Zhengcai Cao*, Yiyang Sun, Zhe Ma, MengChu Zhou, A Context-Enhanced Full-Resolution Floor Plan Segmentation Network for Topological Semantic Mapping, IEEE/RSJ Conference on Intelligent International Robots and Systems, 2024: 9761-9768. (机器人领域顶会)
[47] Hongmin Mu, MengChu Zhou, Zhengcai Cao*, Illumination Adaptation for SAM to Achieve Accurate Segmentation of Images Taken in Low-Light Scenes, IEEE International Conference on Robotics and Automation, 2025, Accepted. (机器人领域顶会)
[48] Junnian Li, MengChu Zhou, Zhengcai Cao*, EDSOD: An Encoder-Decoder, Diffusion-model, and Swin-Transformer-based Small Object Detector, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, Accepted. (机器人领域顶会)
[49] Hongmin Mu, Zhengcai Cao*, Anomaly Knowledge Learning for Patch-Agnostic Defence against Adversarial Patches, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, Accepted. (机器人领域顶会)
[50] Dongjie Huo, Dengshuo Wang, Dong Zhang*, Mengchu Zhou, Zhengcai Cao*, Robust and Real-Time Perception and Planning for UGVs in Complex Outdoor Environments, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, Accepted. (机器人领域顶会)