
| 李 |
 智卿,工学博士,教授,硕士生导师。
智卿,工学博士,教授,硕士生导师。主要研究方向:
移动机器人技术与理论、航空/航天智能装备系统集成技术、工业生产线特种机器人系统集成技术、仿生机器人技术、水下特种机器人系统集成技术等研究等。
邮箱:lizhiqing@mail.buct.edu.cn
工作经历
2019年04月~至今:就职于北京化工大学信息科学与技术学院,教授,硕士生导师,主要机器人方向。承担或参与国家纵向项目3项,中央企业横向项目11项,研制20余种机器人及智能装备。
2013年03月~2019年03月:就职于中国航天科工集团第二研究院,高级工程师。承担多种航天产品型号地面智能化系统研制、“十二五”、“十三五”多种航天产品型号智能装备重点项目研制、空间机器人、卫星太阳翼展开机构、卫星天线展开机构等产品研制。
2011年09年~2013年02月:神华集团(现国家能源投资集团公司),工程师。从事集团公司“绿色采煤系统项目”的子系统“矿用自动化运输设备研制、负责集团公司矿用机器人及智能装备系统论证及开发等。。
2011年01月~2011年09月:东北大学工业流程与自动化国家重点实验室,讲师。
教学课程
| 课程名称 | 学时 | 面向对象 |
| 移动机器人导论 | 32 | 本科生/研究生 |
| 机器人导论 | 32 | 本科生/研究生 |
| 机器人机构学 | 32 | 本科生/研究生 |
主要科研项目及机器人装备成果
| 序号 | 典型项目名称(部分) | 项目来源 |
| 1 | 火星旋翼飞行器姿态控制 | 自然科学基金 |
| 2 | 船舶清洗ROV机器人设计开发 | 企业委托 |
| 3 | 具有视觉探测功能的水下智能清洗机器人设计开发 | 企业委托 |
| 4 | 高线盘卷头尾智能分剪中试设备的制造与集成 | 宝武集团公司 |
| 5 | 钢坯表面缺陷机器手标识与修磨系统开发 | 企业委托 |
| 6 | 方坯表面缺陷打标及修磨设备集成及实施 | 宝武集团公司 |
| 7 | UOE焊管内壁检测系统自主爬管机构及其辅助设备的制造与集成 | 宝武集团公司 |
| 8 | 聚氨酯保温层缺陷检测的便携式检测设备技术开发 | 天津津能集团 |
主要论文
[1] ZhiqingLi, Xinle Liu,Qinghan Hu,Shuai Kang*, Design of an Origami-inspiredSolar Folding Mechanism for Underwater Gliders[J]. OCEANS Limerick2023
[2] HongxingZhou, JuanChen,QinghanHu, Xue Zhao and Zhiqing Li* ;A NovelRelocalization Method-BasedDynamic Steel Billet Flaw Detection_and_Marking System[J].Electronics. Electronics 2023,12,4863:1-14.
[3] ZhiqingLi, Chao fan;Anti-collisionMotion Control of the Industrial Manipulator Based on 3D PointCloud[J]. 2023 6th Internationa l Conference on ElectronicsTechnology,ICET 2023:1294-1299.
[4] HuayingZhu, Zhiqing Li*, Shugen Ma, Longchuan Li, Shuai Kang;Modelingand Simulation of an Eel-likeRobot with Hybrid Control System[C]. OCEANS Limerick 2023.
[5] YingziChen, Zhiqing Li*, Longchuan Li, Shugen Ma, Fuchun Zhang, Chao Fan;Ananti-drone device based on capture technology[J]. BiomimeticIntelligence and Robotics. Volume 2, Issue 3, 2022, 100060,ISSN 2667-3797.
[6] YanranChen,ZhiqingLi∗,ShugenMa,LongchuanLi,YulinYang;CSA-SVMmethod for internal cavitation defects detection and its applicationof district heating pipes[J]. 2022 IEEE/RSJ International Conferenceon Intelligent Robots and Systems(IROS).
[7] ZhifengLiu, ZhiqingLi∗,Shugen Ma; A Steel Billet Crack Marking System: Design AndImplementation[C], 2022International Conference on Service Robotics (ICoSR 2022).
[8] 安晓松,李智卿*,马书根,王瑞琳,刘阳,祝华英; 水下蛇形机器人关节旋转机构建模及运动分析[J]. 传感器与微系统.2022
[9] XinyueWang, Zhiqing Li*, Shugen Ma, Yingzi Chen, Zhifeng Liu; A Navigationand Positioning Method for Indoor Mobile Robots[C]. IEEE ICSMD2021.
[10] Ruilin,Zhiqing Li*, Shugen Ma, Xiaosong An; Development of an underwaterdetection robot[C]. IEEE ICRAIC 2021.[11] ZhengTang, Zhiqing Li*, Shugen Ma, Yanran Chen, Yulin Yang; StructureDesign of Adaptive Pipeline Detection Robot[C]. IEEE ICCAR 2021
[12] TongWu, Zhiqing Li*, Shugen Ma, h Zheng Tang;Trajectory Tracking Designof Multi-robot Formation Based on Leader-Follower[C]. IEEE CRC 2021
[13] 李智卿, 马书根, 李斌, 王明辉, 王越超. 具有自适应能力轮-履复合变形移动机器人的开发[J]. 机械工程学报.2011.47(5):1-10 (EI)
[14] 李智卿, 马书根, 李斌, 王明辉, 王越超.具有自适应能力的轮-履复合变形移动机器人的移动机构与地面约束关系分析[J]. 中国科学 E辑: 技术科学.2011,41(3):276-291
[15] ZhiqingLi, ShugenMa, et al. Analysis for the constraint relation between the groundand the self-adaptive mobile mechanism of a transformable wheel-trackrobot [J]. Sci China Tech Sci, 2011.54(3):610-624. (SCI: 724RN, EI:IP51262493)
[16] 李智卿, 马书根, 李斌, 王越超, 王明辉. 轮-履复合可变形机器人的移动机构参数分析[J]. 中国机械工程,2009, 20(19):2320-2326.
[17] ZhiqingLi, ShugenMa, Bin Li, Minghui Wang, and Yuechao Wang. Design and BasicExperiments of a Transformable Wheel-Track Robot with Self-adaptiveMobile Mechanism [C]. in Proceedings of IEEE/RSJ 2010 InternationalConference on Intelligent Robots and Systems (IROS 2010). IEEE, 2010:1334-1339. (EI号:20110313603363)
[18] ZhiqingLi, ShugenMa, Bin Li, Minghui Wang, and Yuechao Wang. Parameters of the DriveSystem for a Transformable Wheel-Track Robot with Self-adaptiveMobile Mechanism [C]. in Proceedings of IEEE International Conferenceon Robotics and Biomimetics (Robio 2010). IEEE, 2010: 339-344 (EI)
[19] ZhiqingLi, ShugenMa, Bin Li, Minghui Wang, and Yuechao Wang. Kinematics Analysis of aTransformable Wheel-Track Robot with Self-adaptive Mobile Mechanism[C]. in Proceedings of IEEE International Conference on Mechatronicsand Automation (ICMA 2010). IEEE, 2010: 1537-1542 (EI:20104813423859)
[20] ZhiqingLi, ShugenMa, Bin Li, and Yuechao Wang, Minghui Wang. Parameter Design andOptimization for Mobile Mechanism of a Transformable Wheel-TrackRobot [C]. Proc. IEEE Int. Conf. on Automation and Logistics. 2009.Shenyang, China. IEEE, 2009: 158-163. (EI:20094812517015)
授权专利
[1] 李智卿,陈莹姿;一种黑飞无人机捕捉装置. 发明专利,ZL202210173118.9,2023.3.31
[2] 李智卿,王馨悦;一种基于图优化的UWB/IMU的室内移动机器人协同定位方法. 发明专利,ZL202110421274.8,2023.2.28.

机器人及智能装备成果
1、航空航天智能装备
针对航空航天领域装备技术需求展开探索性研究和工程研制,例如火星旋翼飞行器姿态控制技术研究、空间特殊应用技术、空间超冗余机械臂抓取技术研究、空间折展机构技术研究等。
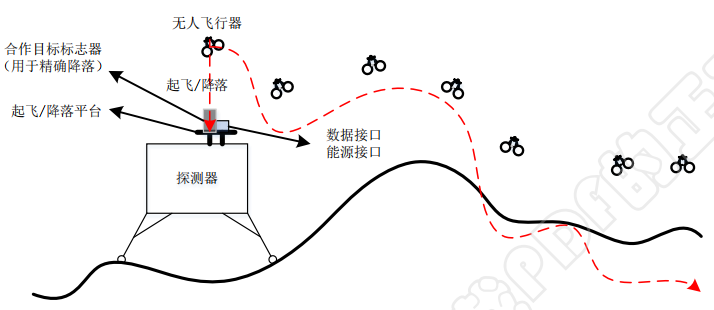
面向火星探测的旋翼飞行器姿态控制技术
2、水下机器人技术
以构建面向海洋的多维度智能机器人探测系统为总体目标,开展关键技术研究和核心技术突破,逐步形成覆盖今还全域、多维度的智能机器人探测系统,并开发多种机器人平台。



面向水下巡检任务的单体式水下机器人平台

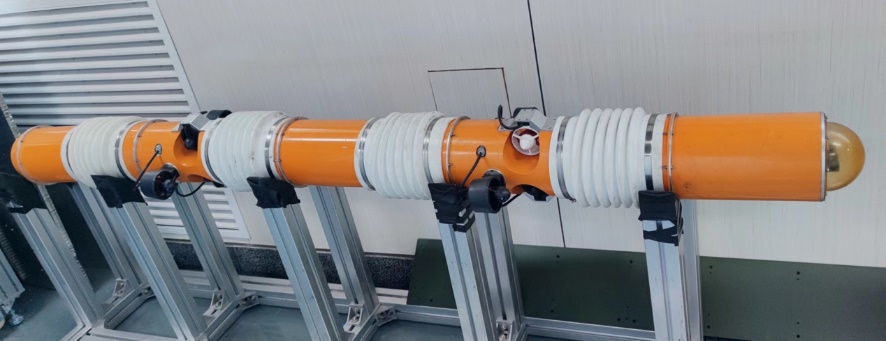

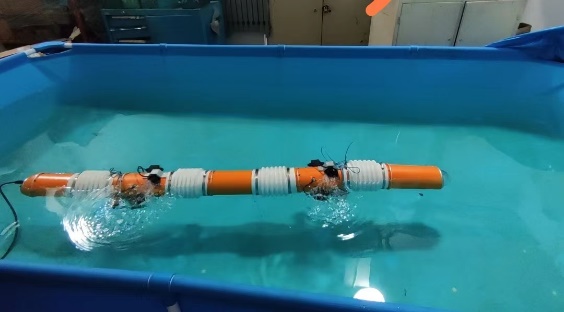
面向海底巡检任务的多关节高机动模块化机器人平台(国内首台套)




面向水中操作任务变结构水下机器人平台研制(国内首台套)
3、智慧工厂机器人应用与集成
承担了多家中央企业的重点技术联合攻关项目,其中包括管道检测机器人技术、钢件缺陷位置精确定位与标记技术、钢坯缺陷位置精确定位与磨削技术、多层复杂结构材料缺陷超声检测与处理显示技术研究、面向超长物体搬运任务的多机器人协同搬运技术等。



面向钢管生产线检测应用的管道检测机器人(国内首台套)


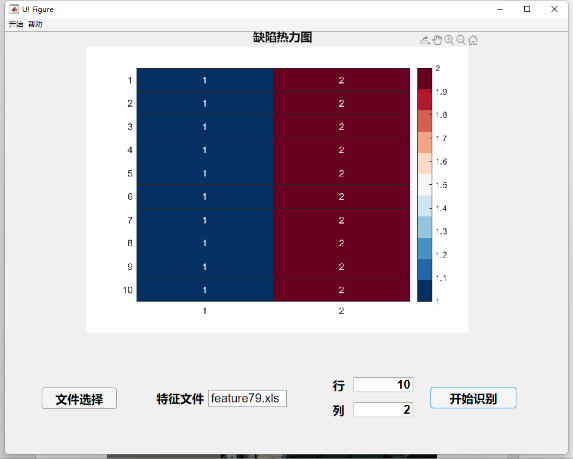
便携式超声波管道缺陷检测仪(国内首台套)


钢坯缺陷位置精确定位做标记机器人(国内首台套)


钢坯缺陷位置精确定位磨削机器人(国内首台套)

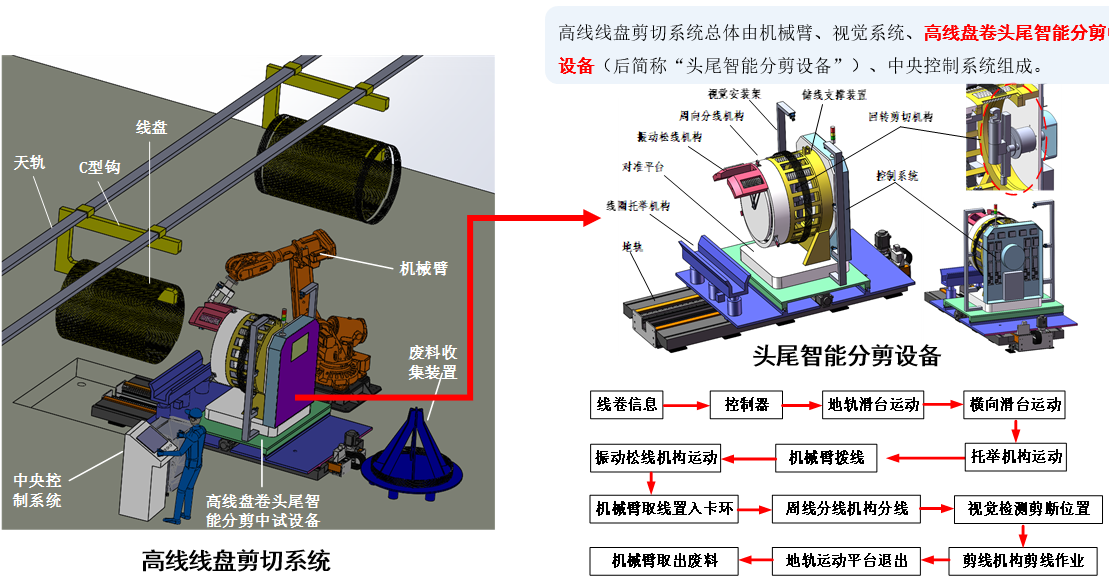
高线盘卷头尾智能分剪中试设备(国内首台套)
4、仿生机器人
针对手部残疾患者康复训练的需求,开发出一种欠驱动式外骨骼手套,通过脑电波激发手套的开合,实现抓取、握取、捏、展开等动作。




基于仿生技术的外骨骼手套研制
5、室内移动类机器人




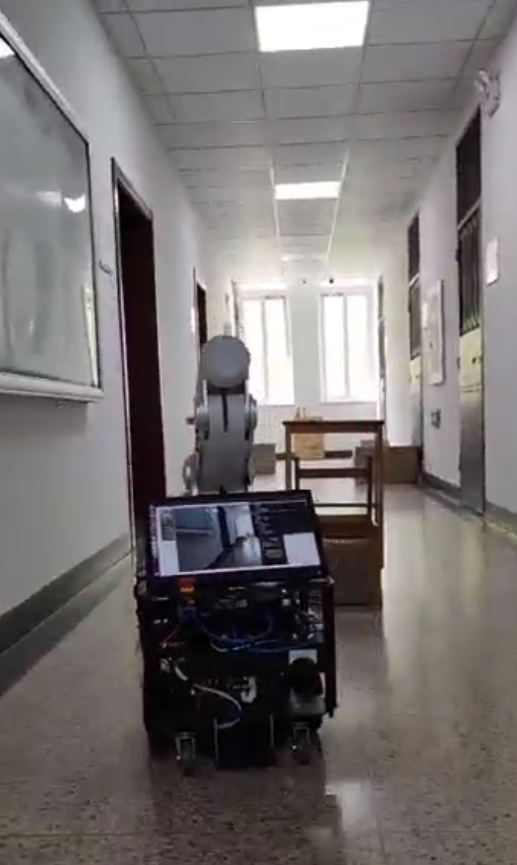
档案馆无人值守机器人系统




操作型机器人
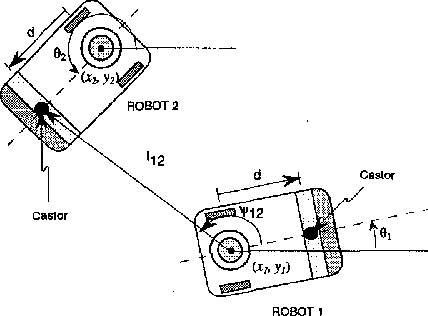

多机器人协同研究
6、爆炸性气体环境防爆机器人
针对天然气管道站巡检、焦化厂地下车间巡检、煤矿井下废弃矿定期巡检等实际需求,设计了适用于I类爆炸性气体环境和II类爆炸性气体环境的巡检机器人。


天然气管道站巡检机器人 焦化厂地下车间环境巡检机器人