
 | 李智卿,工学博士,教授,硕士生导师。2004年毕业于东北大学机械工程及自动化专业,获学士学位;2007年毕业于东北大学获硕士学位,从事并联机器人方向研究;2011年毕业于中国科学院沈阳自动化研究所机器人学国家重点实验室机械电子工程专业移动机器人方向,获工学博士学位。2015年担任国家应急管理部中国煤炭学会第五届计算机通讯专业委员会委员。2023年担任中国机械制造工艺协会绿色制造分会理事。 |
主要研究方向:
移动机器人技术与理论、航空/航天智能装备系统集成技术、工业生产线特种机器人系统集成技术、仿生机器人技术、水下特种机器人系统集成技术等研究等。
邮箱:lizhiqing@mail.buct.edu.cn
工作经历
2019年04月~至今:就职于北京化工大学信息科学与技术学院,教授,硕士生导师,主要机器人方向。承担或参与国家纵向项目3项,中央企业横向项目11项,研制20余种机器人及智能装备。
2013年03月~ 2019年03月:就职于中国航天科工集团第二研究院,高级工程师。承担多种航天产品型号地面智能化系统研制、 “十二五”、“十三五”多种航天产品型号智能装备重点项目研制、空间机器人、卫星太阳翼展开机构、卫星天线展开机构等产品研制。
2011年09年~2013年02月:神华集团(现国家能源投资集团公司),工程师。从事集团公司“绿色采煤系统项目”的子系统“矿用自动化运输设备研制、负责集团公司矿用机器人及智能装备系统论证及开发等。。
2011年01月~2011年09月:东北大学工业流程与自动化国家重点实验室,讲师。
教学课程
课程名称 | 学时 | 面向对象 |
移动机器人导论 | 32 | 本科生/研究生 |
机器人导论 | 32 | 本科生/研究生 |
机器人机构学 | 32 | 本科生/研究生 |
主要科研项目及机器人装备成果
序号 | 典型项目名称(部分) | 项目来源 |
1 | 火星旋翼飞行器姿态控制 | 自然科学基金 |
2 | 船舶清洗ROV机器人设计开发 | 企业委托 |
3 | 具有视觉探测功能的水下智能清洗机器人设计开发 | 企业委托 |
4 | 高线盘卷头尾智能分剪中试设备的制造与集成 | 宝武集团公司 |
5 | 钢坯表面缺陷机器手标识与修磨系统开发 | 企业委托 |
6 | 方坯表面缺陷打标及修磨设备集成及实施 | 宝武集团公司 |
7 | UOE焊管内壁检测系统自主爬管机构及其辅助设备的制造与集成 | 宝武集团公司 |
8 | 聚氨酯保温层缺陷检测的便携式检测设备技术开发 | 天津津能集团 |
主要论文
Zhiqing Li, Xinle Liu,Qinghan Hu,Shuai Kang*, Design of an Origami
inspired Solar Folding Mechanism for Underwater Gliders[J]. OCEANS Limerick 2023
Hongxing Zhou, JuanChen,QinghanHu, Xue Zhao and Zhiqing Li* ;A Novel Relocalization Method
Based Dynamic Steel Billet Flaw Detection_and_Marking System[J]. Electronics. Electronics 2023,12,4863:1-14.
Zhiqing Li, Chao fan;Anti
collision Motion Control of the Industrial Manipulator Based on 3D Point Cloud[J]. 2023 6th Internationa l Conference on Electronics Technology,ICET 2023:1294
1299.
Huaying Zhu, Zhiqing Li*, Shugen Ma, Longchuan Li, Shuai Kang;Modeling and Simulation of an Eel
like Robot with Hybrid Control System[C]. OCEANS Limerick 2023.
Yingzi Chen, Zhiqing Li*, Longchuan Li, Shugen Ma, Fuchun Zhang, Chao Fan;An anti-drone device based on capture technology[J]. Biomimetic Intelligence and Robotics. Volume 2, Issue 3, 2022, 100060, ISSN 2667-3797.
Yanran Chen,Zhiqing Li∗,Shugen Ma,Longchuan Li,Yulin Yang;CSA-SVM method for internal cavitation defects detection and its application of district heating pipes[J]. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).
Zhifeng Liu,Zhiqing Li∗, Shugen Ma; A Steel Billet Crack Marking System: Design And Implementation[C],2022 International Conference on Service Robotics (ICoSR 2022).
安晓松,李智卿*,马书根,王瑞琳,刘阳,祝华英; 水下蛇形机器人关节旋转机构建模及运动分析[J]. 传感器与微系统.2022
Xinyue Wang, Zhiqing Li*, Shugen Ma, Yingzi Chen, Zhifeng Liu; A Navigation and Positioning Method for Indoor Mobile Robots[C]. IEEE ICSMD2021.
Ruilin, Zhiqing Li*, Shugen Ma, Xiaosong An; Development of an underwater detection robot[C]. IEEE ICRAIC 2021.
Zheng Tang, Zhiqing Li*, Shugen Ma, Yanran Chen, Yulin Yang; Structure Design of Adaptive Pipeline Detection Robot[C]. IEEE ICCAR 2021
Tong Wu, Zhiqing Li*, Shugen Ma, h Zheng Tang;Trajectory Tracking Design of Multi-robot Formation Based on Leader-Follower[C]. IEEE CRC 2021
李智卿, 马书根, 李斌, 王明辉, 王越超. 具有自适应能力轮-履复合变形移动机器人的开发[J]. 机械工程学报. 2011.47(5):1-10 (EI)
李智卿, 马书根, 李斌, 王明辉, 王越超.具有自适应能力的轮-履复合变形移动机器人的移动机构与地面约束关系分析[J]. 中国科学 E辑: 技术科学. 2011,41(3):276-291
Zhiqing Li, Shugen Ma, et al. Analysis for the constraint relation between the ground and the self-adaptive mobile mechanism of a transformable wheel-track robot [J]. Sci China Tech Sci, 2011.54(3):610-624. (SCI: 724RN, EI: IP51262493)
李智卿, 马书根, 李斌, 王越超, 王明辉. 轮-履复合可变形机器人的移动机构参数分析[J]. 中国机械工程, 2009, 20(19): 2320-2326.
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Design and Basic Experiments of a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems (IROS 2010). IEEE, 2010: 1334-1339. (EI号: 20110313603363)
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Parameters of the Drive System for a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE International Conference on Robotics and Biomimetics (Robio 2010). IEEE, 2010: 339-344 (EI)
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Kinematics Analysis of a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE International Conference on Mechatronics and Automation (ICMA 2010). IEEE, 2010: 1537-1542 (EI:20104813423859)
Zhiqing Li, Shugen Ma, Bin Li, and Yuechao Wang, Minghui Wang. Parameter Design and Optimization for Mobile Mechanism of a Transformable Wheel-Track Robot [C]. Proc. IEEE Int. Conf. on Automation and Logistics. 2009. Shenyang, China. IEEE, 2009: 158-163. (EI:20094812517015)
授权专利
李智卿,陈莹姿;一种黑飞无人机捕捉装置. 发明专利,ZL20221017311 8.9,2023.3.31
李智卿,王馨悦;一种基于图优化的UWB/IMU的室内移动机器人协同定位方法. 发明专利,ZL202110421274.8,2023.2.28.

机器人及智能装备成果
1、航空航天智能装备
针对航空航天领域装备技术需求展开探索性研究和工程研制,例如火星旋翼飞行器姿态控制技术研究、空间特殊应用技术、空间超冗余机械臂抓取技术研究、空间折展机构技术研究等。

面向火星探测的旋翼飞行器姿态控制技术
2、水下机器人技术
以构建面向海洋的多维度智能机器人探测系统为总体目标,开展关键技术研究和核心技术突破,逐步形成覆盖今还全域、多维度的智能机器人探测系统,并开发多种机器人平台。



面向水下巡检任务的单体式水下机器人平台

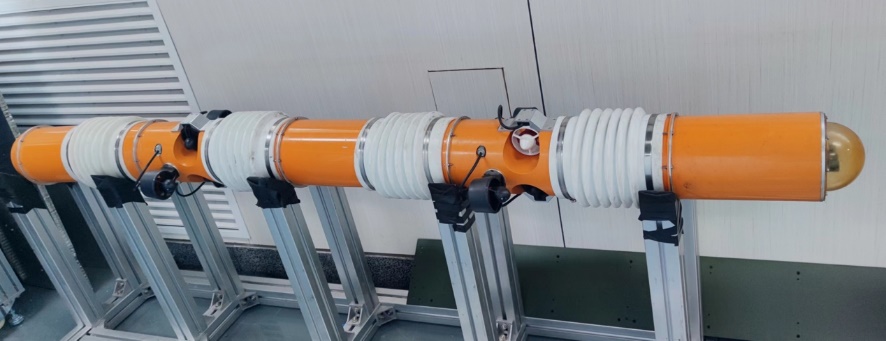

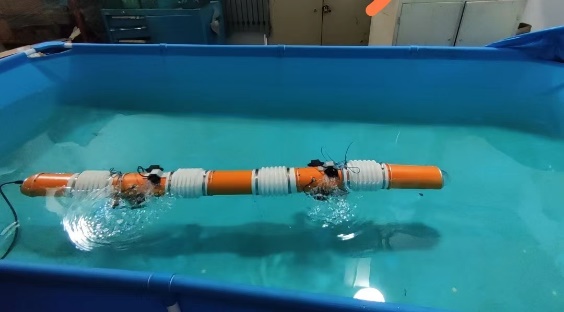
面向海底巡检任务的多关节高机动模块化机器人平台(国内首台套)




面向水中操作任务变结构水下机器人平台研制(国内首台套)
3、智慧工厂机器人应用与集成
承担了多家中央企业的重点技术联合攻关项目,其中包括管道检测机器人技术、钢件缺陷位置精确定位与标记技术、钢坯缺陷位置精确定位与磨削技术、多层复杂结构材料缺陷超声检测与处理显示技术研究、面向超长物体搬运任务的多机器人协同搬运技术等。



面向钢管生产线检测应用的管道检测机器人(国内首台套)



便携式超声波管道缺陷检测仪(国内首台套)


钢坯缺陷位置精确定位做标记机器人(国内首台套)


钢坯缺陷位置精确定位磨削机器人(国内首台套)

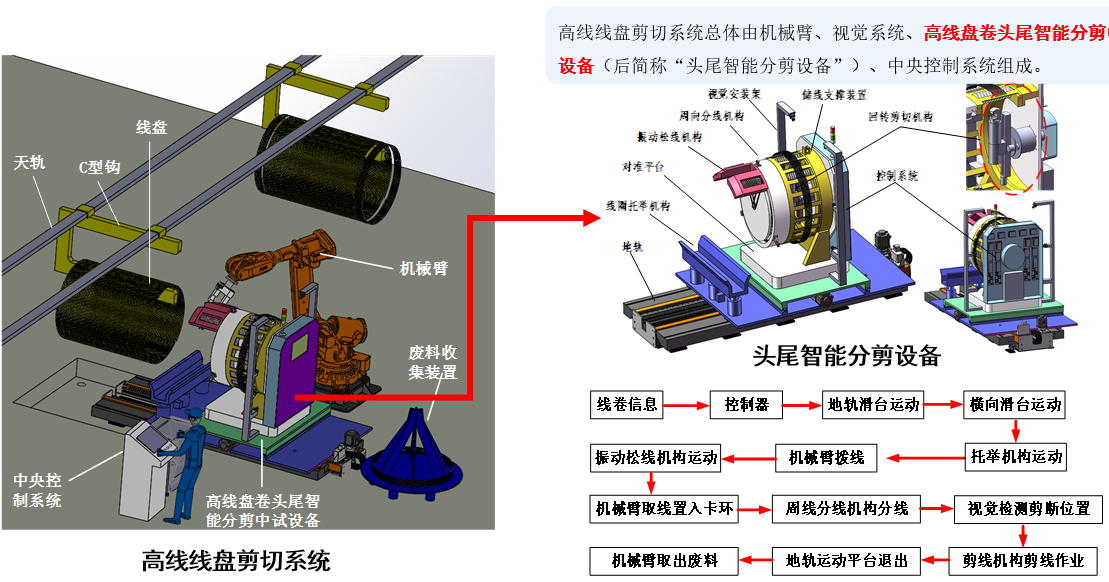
高线盘卷头尾智能分剪中试设备(国内首台套)
4、仿生机器人
针对手部残疾患者康复训练的需求,开发出一种欠驱动式外骨骼手套,通过脑电波激发手套的开合,实现抓取、握取、捏、展开等动作。




基于仿生技术的外骨骼手套研制
5、室内移动类机器人




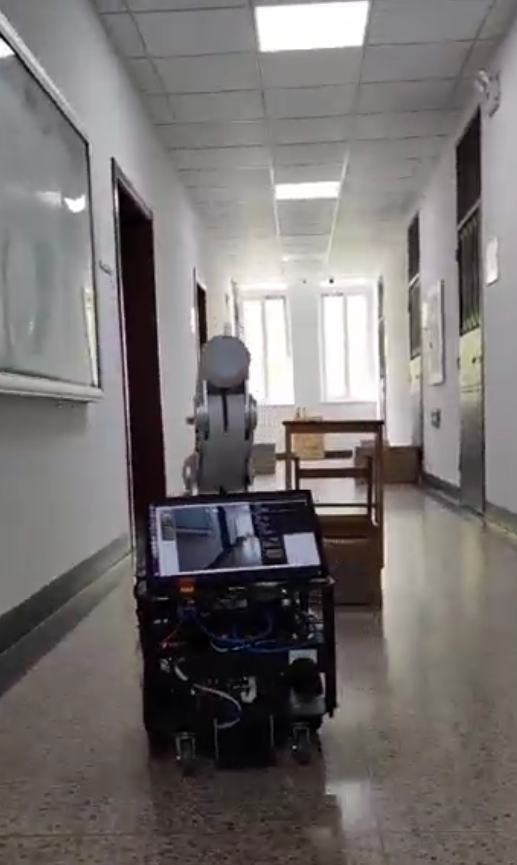
档案馆无人值守机器人系统




操作型机器人


多机器人协同研究
6、爆炸性气体环境防爆机器人
针对天然气管道站巡检、焦化厂地下车间巡检、煤矿井下废弃矿定期巡检等实际需求,设计了适用于I类爆炸性气体环境和II类爆炸性气体环境的巡检机器人。


天然气管道站巡检机器人 焦化厂地下车间环境巡检机器人